
学院视觉感知与机器智能团队3篇论文被人工智能国际顶级会议AAAI 2026录用
近日,视觉感知与机器智能团队3篇论文被国际顶级会议——第40届AAAI人工智能国际会议(The 40th Annual AAAI Conference on Artificial Intelligence)录用,会议将于2026年1月20日至1月27日在新加坡举行。本届会议共收到23680篇有效投稿,最终录用4167篇,录取率为17.6%。AAAI人工智能会议是人工智能领域中历史最悠久、涵盖内容最广泛的国际顶级学术会议之一,被中国计算机学会(CCF)和中国人工智能学会(CAAI)评为A类会议。论文均以西南交通大学为第一署名单位,这是团队连续十年在CCF A类国际会议发表高水平论文。
论文《I2CD: An Invertible Causal Framework for Compositional Zero-Shot Learning via Disentangle-Compose-Disentangle》(作者:Zhaoquan Yuan, Zining Wang, Yuankang Pan, Ao Luo, Wei Li, Xiao Wu, Changsheng Xu)第一作者为袁召全副教授,与中国科学院自动化研究所合作完成。组合零样本学习(CZSL)是人工智能领域的一个关键挑战,旨在识别图像中未见过的状态-对象组合。论文针对该任务中的解耦问题,提出了一种新的可逆因果架构,通过解耦-组合-再解耦机制,采用可逆神经网络、因果干预和反事实生成技术,实现图像的状态-对象解耦,从而增强组合零样本识别的鲁棒性。实验结果表明,该框架在封闭世界和开世界设置下均达到了最先进的性能,尤其在未见组合上表现突出,验证了所提方法的泛化能力与因果解耦的有效性。
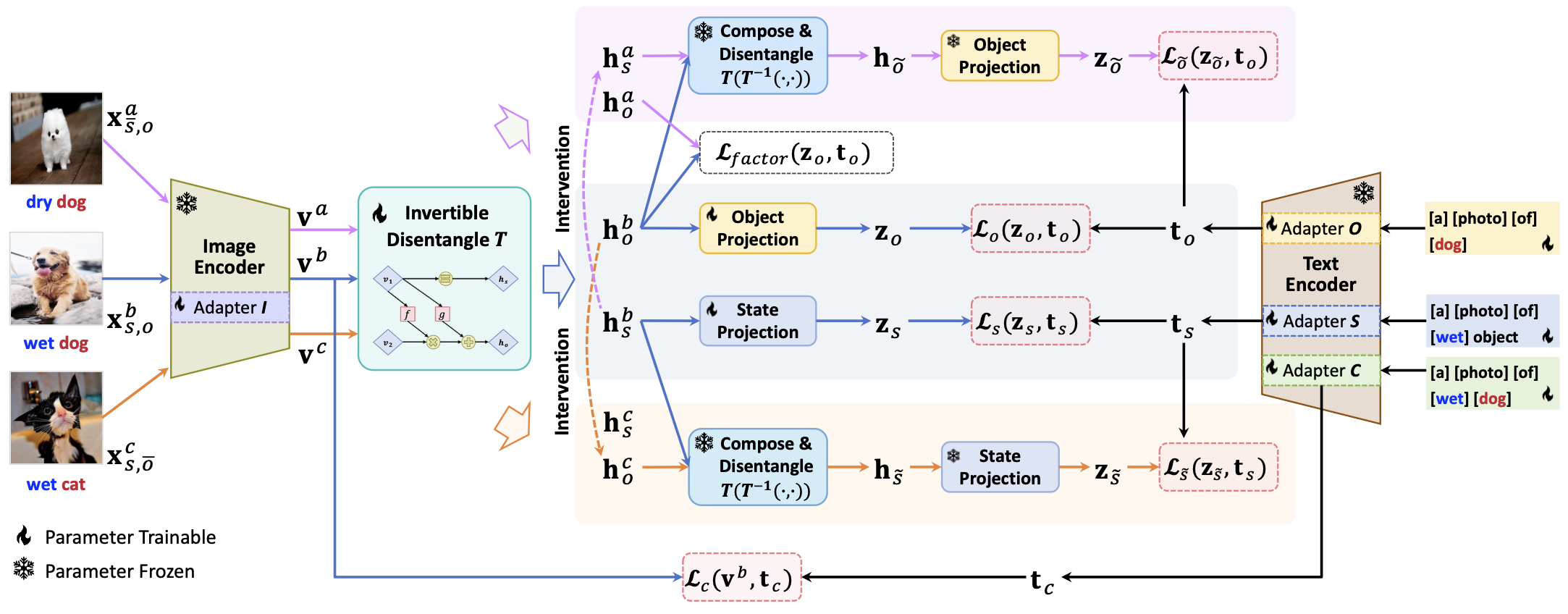
图 1 用于组合零样本学习的可逆因果架构图
论文《Monocular Vehicle Pose and Shape Reconstruction via Dynamic Context Adaptation and Progressive Geometry Refinement》(作者:Wei Li, Long Ji, Ying Wang, Xiao Wu, Zhaoquan Yuan, Penglin Dai)第一作者为李威副教授。从单目图像准确重建3D车辆姿态和形状是自动驾驶领域的一个关键挑战。论文针对现有方法在处理远距离车辆时存在的几何模糊和结构空洞问题,提出了一种名为MonoVPR的新型框架。该框架通过分层双上下文注意力(HDCA)模块动态融合多尺度特征,并采用有界迭代网格优化器(BIMR)模块进行渐进式几何优化,实现高精度的姿态和形状重建。实验表明,MonoVPR在ApolloCar3D基准上达到了较好的性能,尤其在挑战性的远距离场景表现突出,验证了所提方法的有效性。
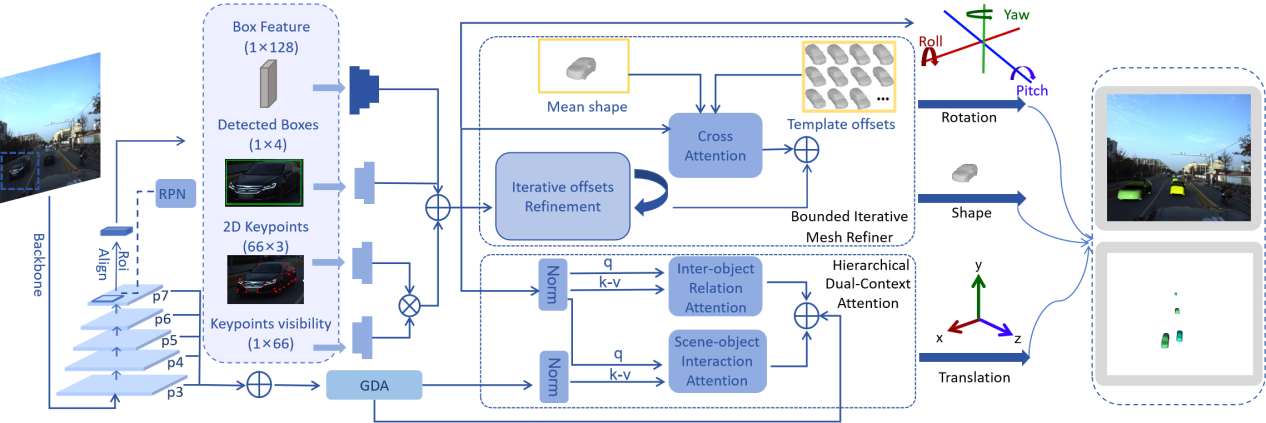
图2 基于动态上下文适应和渐进式几何细化的单目车辆姿态和形状重建框图
论文《InfoCom: Kilobyte-Scale Communication-Efficient Collaborative Perception with Information Bottleneck》(作者:Quanmin Wei, Penglin Dai, Wei Li, Bingyi Liu, Xiao Wu)第一作者为博士生韦全敏,通讯作者为戴朋林副教授。论文提出了首个在KB级别通信带宽下运行的通信高效协同感知框架InfoCom。该框架引入了扩展信息瓶颈原理,从理论上优化了任务关键信息的最小充分提取。核心创新包括:1)信息感知编码,将特征压缩为最小消息,同时保留感知相关信息;2)稀疏掩码生成,以可忽略的通信成本识别空间线索;3)多尺度解码,通过掩码引导机制逐步恢复感知信息,而非简单的特征重建。在多个数据集上的综合实验表明,InfoCom实现了近乎无损的感知性能,同时将通信开销从兆字节级降至千字节级。
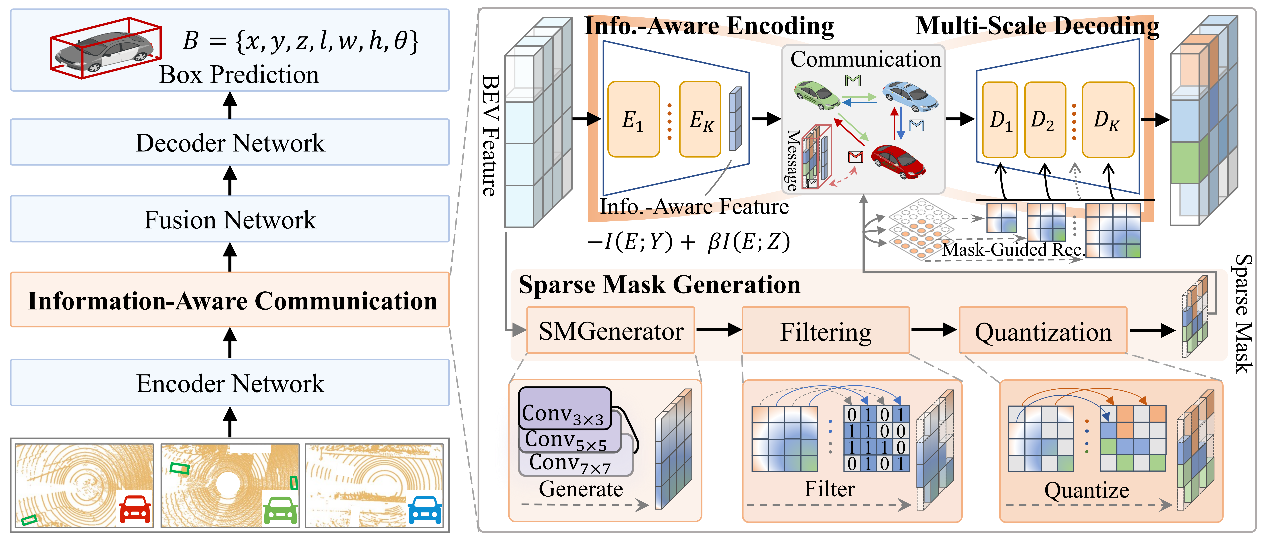
图3 InfoCom模型框架图
相关文章
计算机与人工智能学院党委理论学习中心组召开专题学习会
7月7日,学院召开党委理论学习中心组(扩大)会议,专题学习习近平党建思想、习近平总书记在庆祝中国共产党成立105周年大会上的重要讲话精神。学院党委委员、教工党支部书记、师生党员代表参加本次学习,会议由学院党委书记翟东海主持。 ……
闫学东校长为计算机与人工智能学院师生党员讲授树立和践行正确政绩观专题党课
为深入学习贯彻习近平总书记关于树立和践行正确政绩观的重要论述,全面落实习近平总书记给四所交通大学重要回信精神,扎实推进“十五五”开局阶段学校各项事业高质量发展,引导全院师生党员校准思想航向、明晰行动路径,7月1日,校长、党委……
“人工智能引领时代变革”人工智能领域创新领军工程硕博士分论坛圆满举行
为深入贯彻落实国家关于卓越工程师培养和人工智能发展的战略部署,推动人工智能赋能工程教育改革与产教融合发展,6月26日,由西南交通大学研究生院、国家卓越工程师学院主办,西南交通大学计算机与人工智能学院承办的人工智能领域创新领……